Description
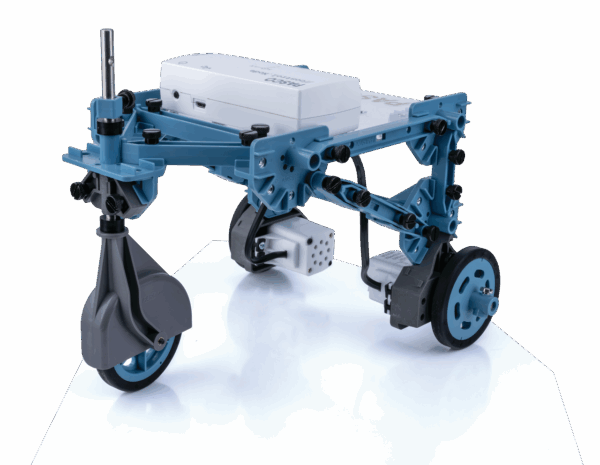
The StructureBOT is a versatile robot kit made from PASCO Structures components, allowing students to build various configurations, including front-wheel and rear-wheel steering, with or without a gripper. It can navigate mazes, turn in circles, and pick up objects.
Features:
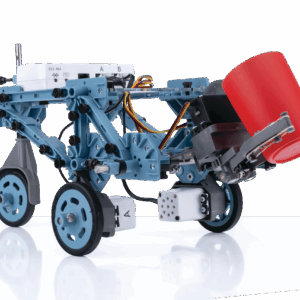
- Multiple Configurations: Options include different steering types and the choice to add or remove a gripper.
- Expandability: Additional PASCO Structures components and sensors can be integrated to enhance the robot’s capabilities.
- Embedded Coding: Blockly coding is embedded in PASCO Capstone and SPARKvue software, allowing students to program and visualize the robot’s movements and motor performance in real-time.
Experiments and Applications:
- Build and program the StructureBOT.
- Perform various maneuvers, such as moving forward/backward, turning, and navigating mazes.
- Use the gripper to move objects and implement advanced features like obstacle avoidance and line following with additional sensors.